 Cet article a été écrit en collaboration avec mon ami François Beaulier dont je vous recommande le blog. Nous avons réfléchi ensemble sur les possibilités qui s’offrent au développeur d’application embarquée pour enregistrer le paramétrage, la configuration, les préférences… bref tout ce qui constitue les données persistantes de son système.
Cet article a été écrit en collaboration avec mon ami François Beaulier dont je vous recommande le blog. Nous avons réfléchi ensemble sur les possibilités qui s’offrent au développeur d’application embarquée pour enregistrer le paramétrage, la configuration, les préférences… bref tout ce qui constitue les données persistantes de son système.
Archives de la catégorie ‘Embarqué’
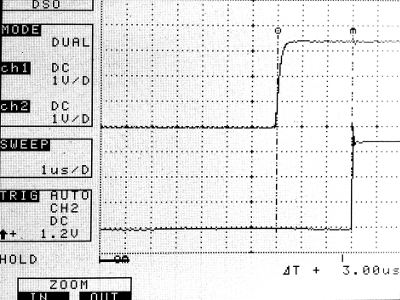
 J’ai continué mes expériences avec la gestion d’interruptions par un driver RTDM-Xenomai sur les ports GPIO d’un Raspberry Pi que j’avais entamées dans le précédent article. Jusqu’alors j’avais pu déterminer « à l’œil » en utilisant un oscilloscope que le temps de réponse était de l’ordre de 3 à 4 micro-secondes, avec des pointes régulières à 8 micro-secondes environ. Ce sont justement ces pointes – et celles plus longues – qui m’intéressent et j’aimerais en avoir un aperçu plus complet. Mon objectif est de pouvoir déterminer le temps de réponse que peut garantir dans le pire des cas un système temps réel construit sur Xenomai avec l’API RTDM.
J’ai continué mes expériences avec la gestion d’interruptions par un driver RTDM-Xenomai sur les ports GPIO d’un Raspberry Pi que j’avais entamées dans le précédent article. Jusqu’alors j’avais pu déterminer « à l’œil » en utilisant un oscilloscope que le temps de réponse était de l’ordre de 3 à 4 micro-secondes, avec des pointes régulières à 8 micro-secondes environ. Ce sont justement ces pointes – et celles plus longues – qui m’intéressent et j’aimerais en avoir un aperçu plus complet. Mon objectif est de pouvoir déterminer le temps de réponse que peut garantir dans le pire des cas un système temps réel construit sur Xenomai avec l’API RTDM.
 Dans un article précédent, j’indiquais que le support des interruptions déclenchées par les ports GPIO du Raspberry Pi n’était pas encore satisfaisant sous Xenomai en utilisant un driver RTDM. Depuis quelques semaines Paul Corner travaille sur le sujet, et il a finalement résolu le problème mercredi dernier. Comme nous le soupçonnions, il y avait un conflit entre le gestionnaire d’interruptions de Xenomai et celui de Linux (qui restait anormalement installé).
Dans un article précédent, j’indiquais que le support des interruptions déclenchées par les ports GPIO du Raspberry Pi n’était pas encore satisfaisant sous Xenomai en utilisant un driver RTDM. Depuis quelques semaines Paul Corner travaille sur le sujet, et il a finalement résolu le problème mercredi dernier. Comme nous le soupçonnions, il y avait un conflit entre le gestionnaire d’interruptions de Xenomai et celui de Linux (qui restait anormalement installé).
Les patches de Paul n’ont pas encore été intégrés dans Xenomai (mais je suppose qu’ils le seront dans les jours à venir). En attendant, voici comment obtenir de meilleurs résultats que précédemment.
 Ce mardi 12 février s’est tenue la seconde édition du Paris Embedded Meetup organisée par la société Joshfire. Je n’avais pas pu assister à la première rencontre qui s’était tenue au mois de novembre pour cause de déplacement professionnel à ce moment, et j’ai découvert avec plaisir cette soirée sympathique et regroupant nombre de participants intéressés par l’embarqué.
Ce mardi 12 février s’est tenue la seconde édition du Paris Embedded Meetup organisée par la société Joshfire. Je n’avais pas pu assister à la première rencontre qui s’était tenue au mois de novembre pour cause de déplacement professionnel à ce moment, et j’ai découvert avec plaisir cette soirée sympathique et regroupant nombre de participants intéressés par l’embarqué.
 Plusieurs personnes m’ont demandé récemment si l’utilisation des GPIO du Raspberry Pi étaient possible en employant un driver RTDM pour Xenomai. Si le traitement des entrées et sorties est effectivement simple, l’utilisation des interruptions pose encore quelques soucis.
Plusieurs personnes m’ont demandé récemment si l’utilisation des GPIO du Raspberry Pi étaient possible en employant un driver RTDM pour Xenomai. Si le traitement des entrées et sorties est effectivement simple, l’utilisation des interruptions pose encore quelques soucis.
Lire la suite de cette entrée »

Tout d’abord je vous souhaite une excellente année 2013, en espérant qu’elle sera – entre autre – riche en hacks, protos, bidouilles, mesures, expérimentations, micro-processeurs, micro-contrôleurs, etc.
Pour commencer cette nouvelle année, je vais vous présenter un petit écran TFT-LCD sympathique prévu pour servir de vue arrière en voiture en le connectant à une petite caméra. Il est tout à fait possible de l’utiliser comme écran portable pour le Raspberry Pi.
 Dans le nouveau numéro de Gnu/Linux Magazine France (n° 155) se trouvent deux articles que j’ai écrits durant les mois de juillet et août sur la construction d’un système Linux embarqué sur Raspberry Pi en partant de zéro. Comme l’actualité concernant le Raspberry Pi évolue rapidement, voici quelques compléments pour les éléments ayant changé depuis la rédaction.
Dans le nouveau numéro de Gnu/Linux Magazine France (n° 155) se trouvent deux articles que j’ai écrits durant les mois de juillet et août sur la construction d’un système Linux embarqué sur Raspberry Pi en partant de zéro. Comme l’actualité concernant le Raspberry Pi évolue rapidement, voici quelques compléments pour les éléments ayant changé depuis la rédaction.
Conformément à la politique d’édition adoptée par les Éditions Diamond, ces articles seront disponibles dans quelques temps ici sous licence CC-BY-NC-ND.
 La communication par lien SPI (Serial Peripheral Interface) est un élément important pour les systèmes embarqués. Ceci concerne les micro-contrôleurs (systèmes industriels par exemple), mais également les cartes à micro-processeurs que l’on emploie de plus en plus pour les piloter. Le system-on-chip qui équipe le Raspberry Pi ne fait pas exception, nous pouvons le vérifier.
La communication par lien SPI (Serial Peripheral Interface) est un élément important pour les systèmes embarqués. Ceci concerne les micro-contrôleurs (systèmes industriels par exemple), mais également les cartes à micro-processeurs que l’on emploie de plus en plus pour les piloter. Le system-on-chip qui équipe le Raspberry Pi ne fait pas exception, nous pouvons le vérifier.
 Le Raspberry Pi ne dispose pas directement de connecteur pour une sortie RS-232. Ce type de liaison est pourtant à mon avis indispensable pour la mise au point d’un système embarqué puisqu’on y trouve les traces du bootloader et du noyau, et qu’il est possible aisément d’y activer une console pour se connecter depuis un émulateur de terminal comme
Le Raspberry Pi ne dispose pas directement de connecteur pour une sortie RS-232. Ce type de liaison est pourtant à mon avis indispensable pour la mise au point d’un système embarqué puisqu’on y trouve les traces du bootloader et du noyau, et qu’il est possible aisément d’y activer une console pour se connecter depuis un émulateur de terminal comme minicom.
Un Raspberry Pi de 512 Mo ?

Depuis quelques jours les Raspberry Pi sont produits et livrés avec 512 Mo de mémoire plutôt que 256 Mo auparavant. Ceux que j’ai reçus ce matin (pour préparer une session de formation) semblent bien disposer de cette extension.
Voyons un peu…