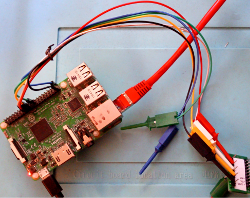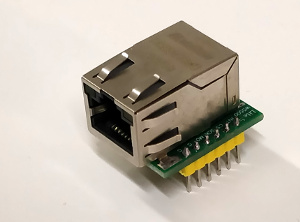
J’ai eu l’occasion, pour le projet d’un client, de tester un petit circuit permettant de disposer d’un port Ethernet sur bus SPI. Je me suis amusé à l’installer sur un Raspberry Pi 3, cela fonctionne assez facilement. Peut-être serez-vous également tentés d’ajouter un port Ethernet à votre Pi ? Cela peut aussi être une bonne solution pour ajouter la connectivité Ethernet à un Compute Module 3 ou tout autre module du même style.
Lire la suite de cette entrée »