Après l’étude des outils disponible en ligne de commande pour piloter des lignes GPIO (partie 1), puis celles de l’accès depuis un programme avec l’appel système ioctl() ou la version context-less de la bibliothèque Libgpiod (partie 2), nous poursuivons en examinant les fonctions bas niveaux de cette bibliothèque. Nous aborderons également le thème des performances d’accès aux GPIO selon la méthode choisie.
Archives de la catégorie ‘Raspberry Pi’
Projet Pi-Logger
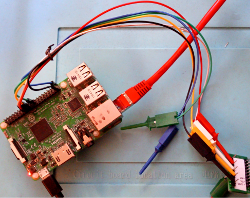
Lors de la mise au point d’un système industriel, il est souvent nécessaire de surveiller les signaux de sortie d’un équipement.
Bien sûr l’oscilloscope et l’analyseur de trames sont indispensables pour l’analyse des signaux instantanés, mais lors des phases de validation d’un produit, il faut généralement faire des observations longues, sur plusieurs heures ou plusieurs jours. Je vous propose un petit outil prévu pour ce genre d’analyse.
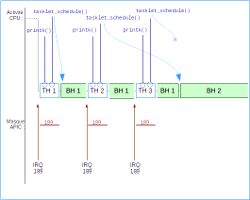
Il existe plusieurs mécanismes proposés par le noyau Linux pour programmer un traitement à réaliser lorsqu’un périphérique externe déclenche une interruption pour nous notifier de l’occurrence d’un événement. Gestionnaire monolithique, tasklet, workqueue, threaded interrupt, chaque solution a des avantages et des inconvénients, qu’il est intéressant de connaître pour optimiser l’efficacité de nos traitements.
Lorsque nous recompilons un noyau Linux pour le Raspberry Pi, nous avons généralement l’habitude d’utiliser un kernel spécifique, disponible sur https://github.com/raspberrypi/linux contenant des drivers absents du noyau standard. Il est néanmoins possible de faire fonctionner sur la plupart des modèles de Raspberry Pi un noyau Linux parfaitement standard (aussi dit Vanilla Kernel). Ceci au prix de quelques efforts de configuration que nous allons voir.
À titre d’exemple, nous allons installer un noyau Linux 4.10.1 (diffusé depuis deux semaines) sur un Raspberry Pi 3.
En outre, nous allons faire fonctionner le Raspberry Pi 3 en mode 64 bits et utiliser le bootloader industriel U-boot !

Dans la longue liste des cartes et composants détruits par un mauvais branchement je viens d’ajouter un Raspberry Pi 2.
Bien qu’assez précautionneux avec les cartes électroniques, je reconnais volontiers ma responsabilité dans plusieurs cas (maladresse, agacement, mauvaise lecture des numéros de broches, etc.). À quelques reprises les erreurs furent commises par des participants à mes sessions de formation.
Cette fois une bonne partie du problème relève de la malchance : je vais vous raconter ma mésaventure en espérant que cela évitera ce genre de situation à l’avenir.

Dans l’article précédent, nous avons réussi à nous connecter depuis un PC hôte vers un Raspberry Pi Zero uniquement en employant un câble USB semblable à ceux pour téléphone portable.
Néanmoins, nous avions relevé plusieurs points restant à améliorer :
- la connexion SSH est un peu longue à établir,
- le Raspberry Pi Zero n’a pas accès à Internet,
- il est nécessaire de fixer manuellement l’adresse IP de l’interface USB-net du côté PC.
Réglons ces problèmes un à un.
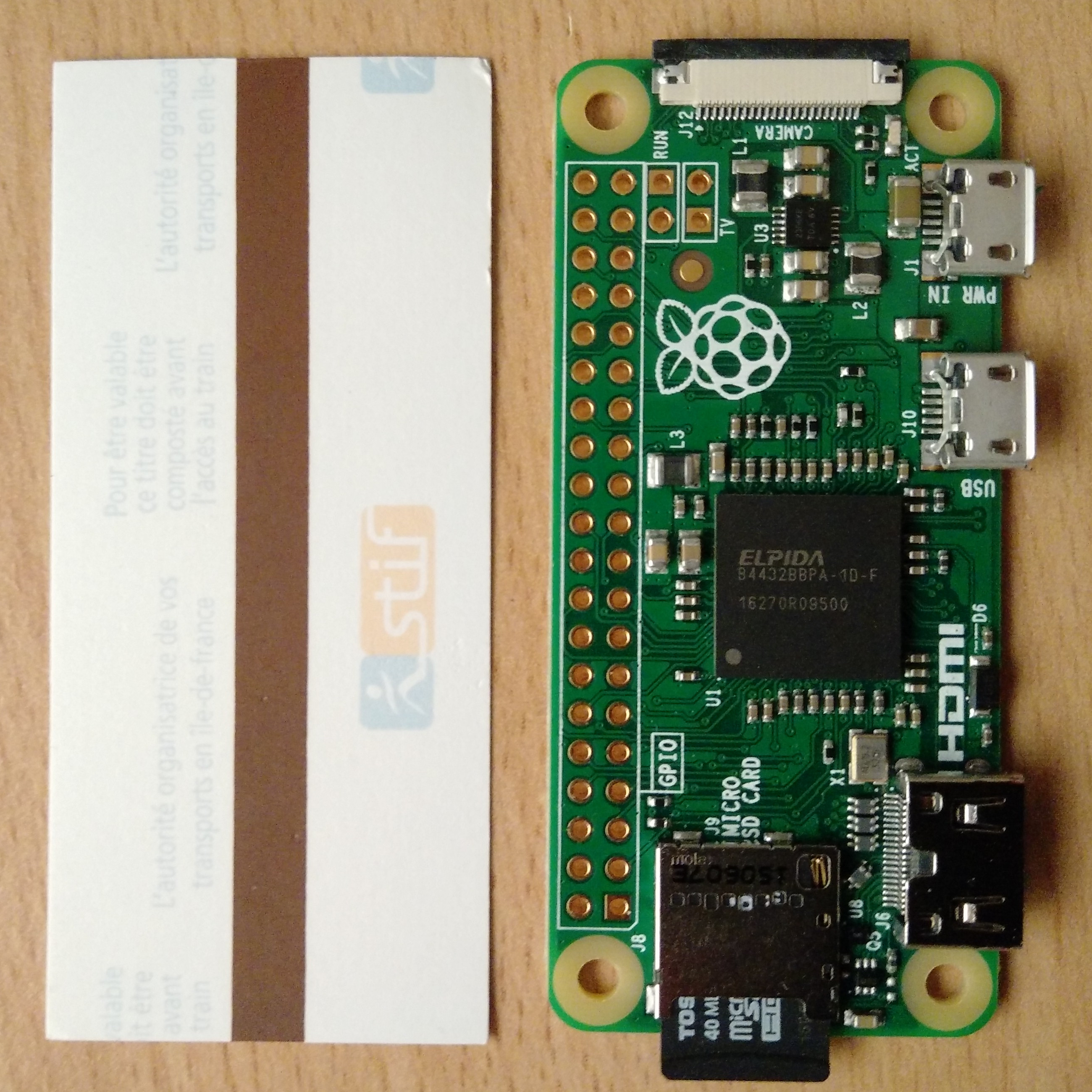 Le petit Raspberry Pi Zero est un nano-ordinateur bien sympathique. Il dispose des capacités équivalentes au Raspberry Pi modèle 1 B+, pour un encombrement à peine supérieur à celui d’un ticket de métro.
Le petit Raspberry Pi Zero est un nano-ordinateur bien sympathique. Il dispose des capacités équivalentes au Raspberry Pi modèle 1 B+, pour un encombrement à peine supérieur à celui d’un ticket de métro.
Victime de son succès le Pi Zero s’écoule au compte-gouttes, mais il devient possible d’en obtenir un assez facilement pour 4$ (plus environ 4$ de port !).
Il existe de nombreux tutoriels de prise en main, à commencer par ceux – excellents – d’Adafruit. L’article ci-dessous permet une prise de contrôle uniquement par l’interface USB-net, sans souder de connecteur série, sans brancher de clavier (ce qui nécessiterait un adaptateur USB-A femelle micro USB-B mâle) ni même d’écran (ce qui nécessiterait un adaptateur HDMI femelle micro-HDMI mâle). Nous allons utiliser le Raspberry Pi Zero nu, et un simple câble USB micro-USB comme on en emploie pour connecter un téléphone portable et un PC.