 Depuis une quinzaine de jours, nous pouvons disposer d’une nouvelle version du Raspberry Pi nommée « Model B+« . La plupart des critiques que l’on faisait au modèle précédent ont été prises en considération dans cette nouvelle mouture.
Depuis une quinzaine de jours, nous pouvons disposer d’une nouvelle version du Raspberry Pi nommée « Model B+« . La plupart des critiques que l’on faisait au modèle précédent ont été prises en considération dans cette nouvelle mouture.
 Il m’arrive fréquemment de développer de petits drivers Linux pour des clients afin de gérer des périphériques spécifiques. Ceci la plupart du temps dans un contexte de système embarqué.
Il m’arrive fréquemment de développer de petits drivers Linux pour des clients afin de gérer des périphériques spécifiques. Ceci la plupart du temps dans un contexte de système embarqué.
Pour la construction d’un système Linux embarqué, ma préférence va généralement à l’environnement de production Buildroot. Celui-ci est plus léger (mais moins riche, il est vrai) que son principal concurrent Yocto.
La documentation de Buildroot est claire et bien fournie, toutefois il n’est pas très facile d’y trouver comment intégrer un driver Linux spécifique, développé pour une cible donnée. Voici donc un petit rappel des fichiers à ajouter ou modifier.
Lire la suite de cette entrée »
Lundi dernier, Linus a publié le nouveau noyau Linux 3.14. Ce dernier contient de nombreuses nouveautés, dont un mécanisme d’ordonnancement temps réel EDF (Earliest Deadline First) qu’il me tarde d’essayer. Pour cela deux nouveaux appels-système sched_getattr() et sched_setattr() sont proposés au programmeur, mais ils ne sont pas encore supportés par les bibliothèques C actuelles. Qu’à cela ne tienne, nous allons les invoquer directement…
Lire la suite de cette entrée »
 On m’a demandé à plusieurs reprises comment compiler les modules pour le noyau du Raspberry Pi que j’ai présenté dans différents articles ou ceux que je propose en illustration de mes sessions de formation. J’emploie généralement une cross-compilation, c’est à dire un compilateur spécifique installé sur un PC pour produire du code pour le processeur à cœur ARM du Raspberry Pi. J’ai déjà présenté cette solution dans plusieurs articles (par exemple celui-ci, celui-ci ou la série d’articles pour Linux Magazine).
On m’a demandé à plusieurs reprises comment compiler les modules pour le noyau du Raspberry Pi que j’ai présenté dans différents articles ou ceux que je propose en illustration de mes sessions de formation. J’emploie généralement une cross-compilation, c’est à dire un compilateur spécifique installé sur un PC pour produire du code pour le processeur à cœur ARM du Raspberry Pi. J’ai déjà présenté cette solution dans plusieurs articles (par exemple celui-ci, celui-ci ou la série d’articles pour Linux Magazine).
Il existe toutefois une autre solution plus simple : la compilation native en utilisant une distribution courante pour Raspberry Pi.
Lire la suite de cette entrée »
 Un lecteur m’a interrogé par mail pour savoir comment mesurer la fréquence d’un signal reçu en entrée sur une broche GPIO du Raspberry Pi. Je lui ai répondu que le plus simple est de mesurer le temps s’écoulant entre deux interruptions successives déclenchées par des fronts montants et de calculer l’inverse. J’ai voulu vérifier que cela fonctionnait, et ai écrit un petit driver pour ce faire.
Un lecteur m’a interrogé par mail pour savoir comment mesurer la fréquence d’un signal reçu en entrée sur une broche GPIO du Raspberry Pi. Je lui ai répondu que le plus simple est de mesurer le temps s’écoulant entre deux interruptions successives déclenchées par des fronts montants et de calculer l’inverse. J’ai voulu vérifier que cela fonctionnait, et ai écrit un petit driver pour ce faire.
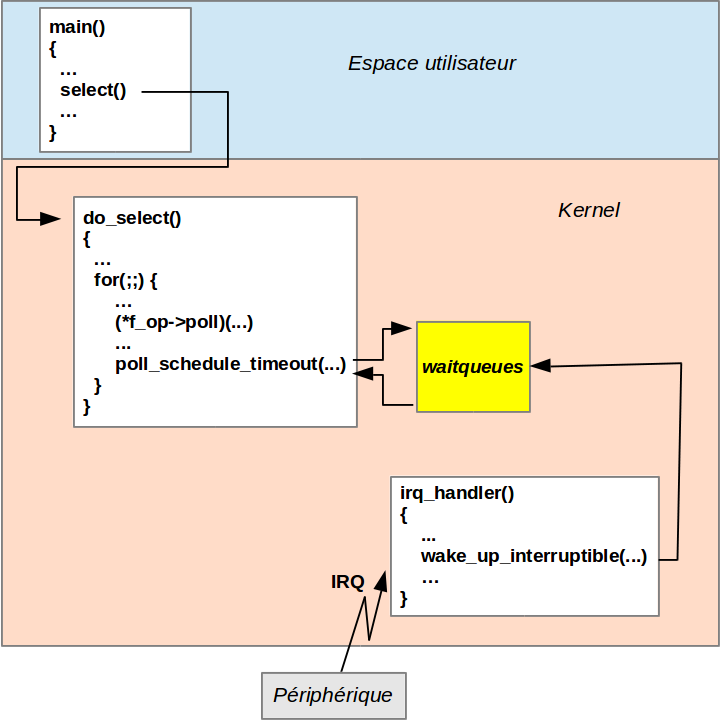
Dans un commentaire récent, Thomas m’interrogeait sur le fonctionnement de l’appel-système select() lorsqu’il est invoqué pour surveiller des entrées GPIO par l’intermédiaire du système de fichiers /sys.
C’est effectivement un sujet intéressant, un peu complexe, que je vais essayer de développer ici. Nous allons commencer par examiner comment select() fonctionne pour des fichiers spéciaux représentant des périphériques classiques puis verrons comment il se comporte lorsqu’il est invoqué pour surveiller un fichier de sysfs.
Lire la suite de cette entrée »

J’ai le plaisir de voir mon article « Optimisation du temps de boot d’un système embarqué » faire la couverture d’Open Silicium numéro 9.
[EDIT 2017/01] L’article est dorénavant disponible au format PDF.
Les fichiers accompagnant les expérimentations de l’article sont disponibles dans cette archive ou individuellement ci-dessous.
- chronoboot.c : le programme utilisé sur le système de mesure,
- up-gpio.c : le premier programme de test,
- mount-sys-fs-up-gpio.c : le deuxième programme de test,
- mount-sys-fs-up-gpio-init.c : le troisième programme de test,
- config-01, config-02, config-03, config-04, config-05, config-06, config-07, config-08, config-09, config-10, config-11, config-12, config-13, config-14 : les fichiers de configuration du noyau correspondant aux différentes étapes d’optimisation,
- message-logo.ppm : le message affiché pendant pendant le boot à la place du manchot Tux habituel,
- RPI.jpg : la photo du Rasberry Pi que j’affiche à la fin du boot.
{kind=link}
Dans le cadre du séminaire « Du micro-contrôleur au PC embarqué » organisé à Villeneuve d’Ascq par Cap’Tronic et le Parc Scientifique de la Haute Borne , j’ai présenté aujourd’hui une conférence sur la transition que représente, pour un développeur accoutumé à la programmation de micro-contrôleur, l’évolution vers une application s’exécutant sur un système Linux embarqué.
Le contenu de ma présentation intitulée « Du firmware sur micro-contrôleur à l’application embarquée : Architectures, techniques et méthodes logicielles » est disponible ici.
 Je participe ce matin aux conférences « Les matinales de l’embarqué » du salon Enova Paris.
Je participe ce matin aux conférences « Les matinales de l’embarqué » du salon Enova Paris.
Je vais y présenter un tour d’horizon des cartes pour Linux embarqué disponibles « sur étagère » (Raspberry Pi, CubieBoard, BeagleBoard, OLinuXino, etc.) en essayant de dégager quelques critères de choix et en fournissant un aperçu des possibilités de ces Single-Board-Computers.
Le contenu de ma présentation est disponible ici.