J’ai présenté ce matin une conférence « Optimisation d’un système Linux industriel » dans le cadre d’un séminaire Cap’tronic, LEA Valley et ID4CAR à Nantes. Les slides de ma présentation sont disponibles. Je compte présenter plus en détails certains thèmes (accélération du boot, empreinte mémoire, etc.) dans des articles à venir.
 Pour une fois cet article ne parlera ni d’informatique, ni d’électronique. Pas de Raspberry Pi, pas de Pandaboard. Aucun Beagle Bone non plus que de micro-contrôleur. Je vais juste parler d’un loisir qui occupe mon – rare – temps libre depuis quelques mois : le pilotage VFR, et plus particulièrement de mon expérience du jour : le lâcher.
Pour une fois cet article ne parlera ni d’informatique, ni d’électronique. Pas de Raspberry Pi, pas de Pandaboard. Aucun Beagle Bone non plus que de micro-contrôleur. Je vais juste parler d’un loisir qui occupe mon – rare – temps libre depuis quelques mois : le pilotage VFR, et plus particulièrement de mon expérience du jour : le lâcher.
Un client m’a interrogé récemment sur la mise en œuvre d’une notification d’événements entre threads. Je l’ai tout naturellement aiguillé vers l’emploi d’une variable condition pthread_cond_t. Toutefois lorsque les notifications se sont produites par rafales rapides, des problèmes se sont posés, que je n’ai pu résoudre qu’avec l’emploi d’un sémaphore supplémentaire.
 Le Raspberry Pi ne comporte pas de bouton « reset » – ni d’ailleurs aucun autre bouton – et la plupart du temps on le redémarre soit logiciellement (en utilisant la commande
Le Raspberry Pi ne comporte pas de bouton « reset » – ni d’ailleurs aucun autre bouton – et la plupart du temps on le redémarre soit logiciellement (en utilisant la commande reboot par exemple) soit électriquement en le débranchant puis le rebranchant.
Il est pourtant pratique de disposer d’un bouton de réinitialisation hard lors de développement de modules kernel susceptibles de geler le système en cas d’erreur ou si des tâches temps réel se mettent à boucler frénétiquement.
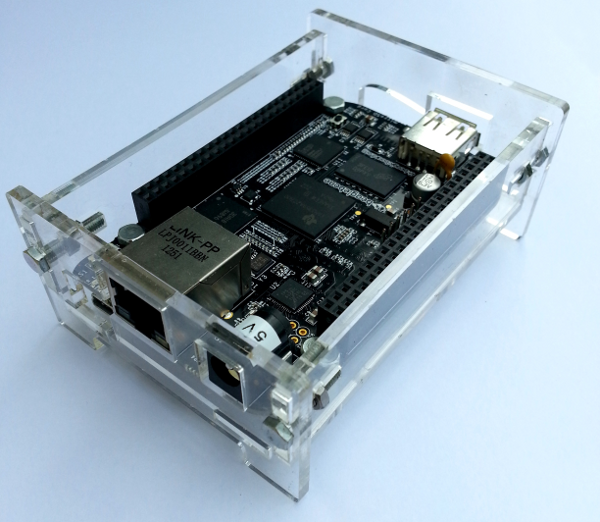 Mon confrère Nathaël Pajani m’a fait parvenir deux exemplaires des coffrets qu’il a fait réaliser par la Fabrique d’objets libres (FabLab) de Lyon pour protéger les BeagleBones qu’il utilise en cours.
Mon confrère Nathaël Pajani m’a fait parvenir deux exemplaires des coffrets qu’il a fait réaliser par la Fabrique d’objets libres (FabLab) de Lyon pour protéger les BeagleBones qu’il utilise en cours.
 Le nouveau BeagleBone Black est compatible avec son prédécesseur blanc en ce qui concerne les ports d’entrées-sorties, ce qui lui permet d’hériter de ses fameuses « capes » (les cartes d’extension que l’on peut empiler afin d’ajouter de nouvelles fonctionnalités). Pour commencer à explorer le BeagleBone Black, je me suis intéressé à ses entrées analogiques, comme @HuguesSert me l’avait suggéré sur Twitter.
Le nouveau BeagleBone Black est compatible avec son prédécesseur blanc en ce qui concerne les ports d’entrées-sorties, ce qui lui permet d’hériter de ses fameuses « capes » (les cartes d’extension que l’on peut empiler afin d’ajouter de nouvelles fonctionnalités). Pour commencer à explorer le BeagleBone Black, je me suis intéressé à ses entrées analogiques, comme @HuguesSert me l’avait suggéré sur Twitter.
 Si vous désirez voir les messages de boot du noyau Linux, ou vous connecter sur l’interface du bootloader Uboot, ou encore ouvrir une console texte d’administration rapidement, vous pouvez facilement employer le connecteur Serial Debug du BeagleBone Black.
Si vous désirez voir les messages de boot du noyau Linux, ou vous connecter sur l’interface du bootloader Uboot, ou encore ouvrir une console texte d’administration rapidement, vous pouvez facilement employer le connecteur Serial Debug du BeagleBone Black.