 Il y a un quart d’heure de cela, un livreur a déposé sur mon bureau deux exemplaires (pour limiter les frais de port) d’un nouveau terrain de jeu pour hackers de Linux embarqué : le BeagleBone Black. Je vous propose un petit tour de piste rapide…
Il y a un quart d’heure de cela, un livreur a déposé sur mon bureau deux exemplaires (pour limiter les frais de port) d’un nouveau terrain de jeu pour hackers de Linux embarqué : le BeagleBone Black. Je vous propose un petit tour de piste rapide…
 Cet article a été écrit en collaboration avec mon ami François Beaulier (dont je vous recommande le blog). Nous avons réfléchi ensemble sur les possibilités qui s’offrent au développeur d’application embarquée pour enregistrer le paramétrage, la configuration, les préférences… bref tout ce qui constitue les données persistantes de son système.
Cet article a été écrit en collaboration avec mon ami François Beaulier (dont je vous recommande le blog). Nous avons réfléchi ensemble sur les possibilités qui s’offrent au développeur d’application embarquée pour enregistrer le paramétrage, la configuration, les préférences… bref tout ce qui constitue les données persistantes de son système.
 Nous avons déjà vu dans plusieurs articles qu’il était facile de manipuler les GPIO sous Linux depuis l’espace utilisateur avec l’interface
Nous avons déjà vu dans plusieurs articles qu’il était facile de manipuler les GPIO sous Linux depuis l’espace utilisateur avec l’interface /sys. Jusqu’à présent je ne m’étais intéressé qu’aux lectures et écritures, mais il est également possible de faire des attentes passives de changement d’état avec select() ou poll(). Voyons-en une mise en œuvre sur le Raspberry Pi.
 Lors de l’écriture d’un script shell on est souvent amené à rechercher une chaîne de caractères ou une expression régulière dans un ensemble de fichiers. Un exemple typique consiste à rechercher les utilisations d’une fonction dans une arborescence de fichiers sources. Plusieurs possibilités s’offrent à nous mais elles ne sont pas équivalentes en terme d’efficacité.
Lors de l’écriture d’un script shell on est souvent amené à rechercher une chaîne de caractères ou une expression régulière dans un ensemble de fichiers. Un exemple typique consiste à rechercher les utilisations d’une fonction dans une arborescence de fichiers sources. Plusieurs possibilités s’offrent à nous mais elles ne sont pas équivalentes en terme d’efficacité.
Cet article a été écrit en collaboration avec mon ami François Beaulier dont je vous recommande le blog. Nous avons réfléchi ensemble sur les possibilités qui s’offrent au développeur d’application embarquée pour enregistrer le paramétrage, la configuration, les préférences… bref tout ce qui constitue les données persistantes de son système.
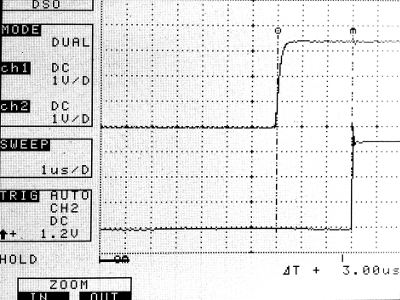
 J’ai continué mes expériences avec la gestion d’interruptions par un driver RTDM-Xenomai sur les ports GPIO d’un Raspberry Pi que j’avais entamées dans le précédent article. Jusqu’alors j’avais pu déterminer « à l’œil » en utilisant un oscilloscope que le temps de réponse était de l’ordre de 3 à 4 micro-secondes, avec des pointes régulières à 8 micro-secondes environ. Ce sont justement ces pointes – et celles plus longues – qui m’intéressent et j’aimerais en avoir un aperçu plus complet. Mon objectif est de pouvoir déterminer le temps de réponse que peut garantir dans le pire des cas un système temps réel construit sur Xenomai avec l’API RTDM.
J’ai continué mes expériences avec la gestion d’interruptions par un driver RTDM-Xenomai sur les ports GPIO d’un Raspberry Pi que j’avais entamées dans le précédent article. Jusqu’alors j’avais pu déterminer « à l’œil » en utilisant un oscilloscope que le temps de réponse était de l’ordre de 3 à 4 micro-secondes, avec des pointes régulières à 8 micro-secondes environ. Ce sont justement ces pointes – et celles plus longues – qui m’intéressent et j’aimerais en avoir un aperçu plus complet. Mon objectif est de pouvoir déterminer le temps de réponse que peut garantir dans le pire des cas un système temps réel construit sur Xenomai avec l’API RTDM.
 Dans le numéro 158 (mars 2013) de Gnu Linux Magazine France se trouve la suite des articles que j’avais écrits sur la création d’un système « from scratch » sur Raspberry Pi (Linux Mag’ 155).
Dans le numéro 158 (mars 2013) de Gnu Linux Magazine France se trouve la suite des articles que j’avais écrits sur la création d’un système « from scratch » sur Raspberry Pi (Linux Mag’ 155).
Les fichiers décrits dans cet article sont accessibles à partir de cette page de téléchargement.
 Dans un article précédent, j’indiquais que le support des interruptions déclenchées par les ports GPIO du Raspberry Pi n’était pas encore satisfaisant sous Xenomai en utilisant un driver RTDM. Depuis quelques semaines Paul Corner travaille sur le sujet, et il a finalement résolu le problème mercredi dernier. Comme nous le soupçonnions, il y avait un conflit entre le gestionnaire d’interruptions de Xenomai et celui de Linux (qui restait anormalement installé).
Dans un article précédent, j’indiquais que le support des interruptions déclenchées par les ports GPIO du Raspberry Pi n’était pas encore satisfaisant sous Xenomai en utilisant un driver RTDM. Depuis quelques semaines Paul Corner travaille sur le sujet, et il a finalement résolu le problème mercredi dernier. Comme nous le soupçonnions, il y avait un conflit entre le gestionnaire d’interruptions de Xenomai et celui de Linux (qui restait anormalement installé).
Les patches de Paul n’ont pas encore été intégrés dans Xenomai (mais je suppose qu’ils le seront dans les jours à venir). En attendant, voici comment obtenir de meilleurs résultats que précédemment.
 Ce mardi 12 février s’est tenue la seconde édition du Paris Embedded Meetup organisée par la société Joshfire. Je n’avais pas pu assister à la première rencontre qui s’était tenue au mois de novembre pour cause de déplacement professionnel à ce moment, et j’ai découvert avec plaisir cette soirée sympathique et regroupant nombre de participants intéressés par l’embarqué.
Ce mardi 12 février s’est tenue la seconde édition du Paris Embedded Meetup organisée par la société Joshfire. Je n’avais pas pu assister à la première rencontre qui s’était tenue au mois de novembre pour cause de déplacement professionnel à ce moment, et j’ai découvert avec plaisir cette soirée sympathique et regroupant nombre de participants intéressés par l’embarqué.
 Ce dimanche 10 février, Richard M. Stallman a donné une conférence intitulée « A Free Digital Society » à Nanterre, à l’invitation du Parti Pirate.
Ce dimanche 10 février, Richard M. Stallman a donné une conférence intitulée « A Free Digital Society » à Nanterre, à l’invitation du Parti Pirate.
Toujours aussi intéressant et non-conformiste, son intervention décontractée (pas de slides ni de notes) a duré trois heures. Il a décrit de nombreuses situations où la liberté des utilisateurs peut se trouver menacée face aux évolutions de la société numérique.
J’ai pris quelques notes, que voici résumées rapidement.
Lire la suite de cette entrée »